|
Following the
rules below, try to beat the best time of the Harker School Robotics
Club. They used a handyboard and lego components. Programming was
done with IC (Interactive C).
Times:
Run 1 -- 4.91 s
Run 2 -- 5.16 s
Run 3 -- 4.82 s
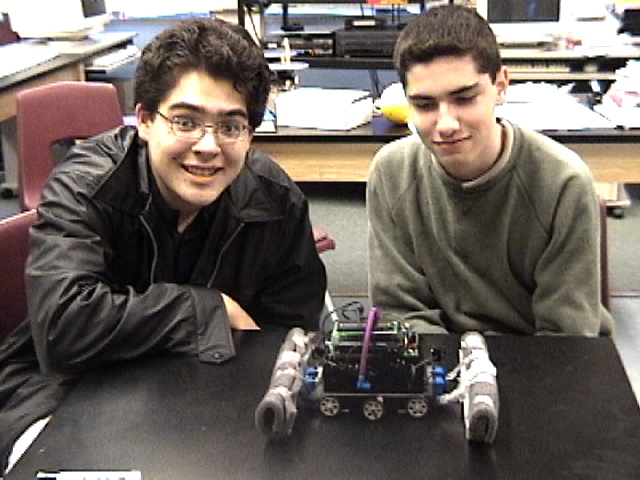
Harker Robotics Club "Four Can Competition" contributors: Alan Malek,
Alex Segal (chief programmer), Jerry Chi, Misha Nasdledov, Joel
Wright, Aaron Kleinsteiber, Adrik McIlroy, Gregory Perkins and faculty
advisor Dr. Randal Harrington (physics teacher).
The Challenge:
Construct and program a small autonomous mobile robot using the
pieces from a Botball competition kit, a FIRST LEGO League kit or
LEGO Mindstorms kit. The robot must move between two stacks of soda
cans without knocking the cans over or moving them outside the circles.
The objective is to move from one stack of cans to the other and
back in the shortest amount of time.
The challenge board may be constructed from a standard piece of
white tile board (available at Home Improvement or hardware stores-the
same as is used in the Botball tournaments), black cloth tape (about
2 inches wide) and four aluminum soda cans (two empty and two full)
using the diagram below.
The challenge board is made from a 4x4 ft white tile board. The
circles are lines 4 inches in diameter and about 1/8" wide, printed
on a 4 inch square white paper and attached to the board with clear
tape. The cans at A and B are centered in the circles (an empty
can on top of a full can). The center of each circle is 6 inches
from the two nearest edges. The tape track is made with 2 inch black
tape and starts 3 inches from the center of circle A curves out
to 8 inches away from the center of a straight line and then curves
back to 3 inches from the center of B circle. The shape of the curve
approximates an arc with its center at point "0" in the lower left
corner of the board.
The Rules:
- The robot cannot use more than two drive motors.
- Each robot should wait five seconds after the start button
has been pressed before moving. The time of the run will start
when the robot starts to move.
- The robot starts with one end of the robot within the 4" circle
that surrounds the "A" can tower.
- Robots must start moving within 10 seconds after the run button
has been pushed. If they do not, they will receive a maximum
time for the run (30 seconds)
- Robots must finish the course within 30 seconds. If they do
not, they will be assigned that time.
- Robots can take any path they wish, but...
- Robots must move from overlapping the "A" tower circle to
overlapping the circle that surrounds the "B" tower, and then
back to the "A" tower circle. Robots may touch the can, but
will be penalized if they move any can outside of its corresponding
circle.
- Robot wheels must not leave the challenge board (or if the
board is edged, the robot cannot touch the edge).
- Robots must stop when the task is completed.
- Robots must not be more than 12 inches in any dimension at
any time of their run.
The Scorecard:
- The winning robot will be chosen based upon its performance.
- The robot performance is evaluated based on time:
- The winning robot will have the shortest round trip time
between A and B, based on the average of the times for the
best two out of three runs. (The robot must complete two
runs to qualify.)
- The robot will have one second added to its time for every
can that it moves beyond the circle--with any part of the
can outside of its circle.
- The time of a robot is calculated by a judge with a stopwatch.
The time starts when the robot moves, and ends when it stops
after having completed a round trip between circle A and
B.
- A robot that does not stop or start will be disqualified
for that run.
- A robot that leaves the board or touches an edge will
be disqualified for that run
The Awards
and Recognition:
- NASA-recognized races must be supported by a supervising teacher.
- We request that the winning robot be recorded for at least
one run on a Camcorder (any convenient standard format) so that
we can post a clip of the winning run. If a local contest is
held, a video record of the whole competition is suggested.
- The time (to the nearest 1/10 second) or the winning time
from each local contest should be submitted by the supervising
teacher via e-mail along with a jpeg photo of the robot (minimum
size of 640 x 480 pixels) and the names of all participants.
Please email (terry.l.grant@nasa.gov) them to Terry
Grant.
- NASA Robotics Education Project personnel will select the
winners, resolve potential ties and the teachers will be contacted
for video clips, team pictures and any design reports from the
winning teams. Separate categories will be judged for RCX and
Handy Board controlled robots if we receive sufficient entries.
NASA also reserves the right to issue special 'judges' choice'
awards for entries with unique designs.
- The overall winners will receive a NASA plaque and each student
participant will receive a certificate. The pictures, any design
reports and a video clip of the winning robots will be posted
on the Robotics web site
- We encourage a public competition within entering schools
and a regional competition between schools; please keep us informed
so that we can announce regional winners on our web site.
|